製品
AGV-自動誘導車両
高性能完全保護潜伏AGV



の 潜在移動ロボット シリーズは、昇降機構によって在庫棚やパレットをピッキング ステーションに移動します。最適化された動作パフォーマンスと強化された安全保護により、生産性とコスト効率の高い商品から個人へのソリューションを提供します。
倉庫内での回転や生産ラインと倉庫間の接続には、フローの需要に応じて従来のフォークリフトやその他のハンドリングツールに代わる柔軟なハンドリングAGVが選択されます。 Kingmore スマートは、ハンドリング システム、倉庫、生産ラインの間で情報のやり取りを形成し、リンク全体で情報のトレーサビリティを確保し、インテリジェントで柔軟な生産を実現し、手動使用の需要を削減します。
1.リフトタイプ
リフティングロボットは自律的な積み込み・昇降・搬送を実現する自動物流機器です。昇降装置を備えており、荷物を地上から高い位置まで持ち上げて荷役や保管などの作業を行うことができるのが特徴です。通常、産業および倉庫物流アプリケーションで使用され、生産効率を効果的に向上させ、物流コストを削減します。
Q2-400D | 揚程(mm) | 60 |
| 規定荷重(kg) | 400 | |
| ナビゲーション | QRコード/LSLAM | |
| 登坂性(°) | 3 | |
| 回転径(mm) | 820 | |
| 定格運転時間(h) | 8 | |
| 寸法L*W*H(mm) | 780*545*300 | |
| 定格使用速度(無負荷)(m/s) | 2.0 | |
| 重量(kg) | 93 | |
| 位置決め精度(mm,°) | ±10/±1 | |
| 充電時間(h) | ≤1.5 | |
| ドライブモード | ディファレンシャルドライブ |
Q3-600D | 揚程(mm) | 60 |
| 規定荷重(kg) | 600 | |
| ナビゲーション | QRコード/LSLAM | |
| 登坂性(°) | 3 | |
| 回転径(mm) | 995 | |
| 定格運転時間(h) | 8 | |
| 寸法L*W*H(mm) | 950*650*250 | |
| 定格使用速度(無負荷)(m/s) | 2.0 | |
| 重量(kg) | 132 | |
| 位置決め精度(mm,°) | ±10/±1 | |
| 充電時間(h) | ≤1.5 | |
| ドライブモード | ディファレンシャルドライブ |
Q7-1000E | 揚程(mm) | 60 |
| 規定荷重(kg) | 1000 | |
| ナビゲーション | QRコード/LSLAM | |
| 登坂性(°) | 3 | |
| 回転径(mm) | 1200 | |
| 定格運転時間(h) | 8 | |
| 寸法L*W*H(mm) | 1150*820*254 | |
| 定格使用速度(無負荷)(m/s) | 2.0 | |
| 重量(kg) | 172 | |
| 位置決め精度(mm,°) | ±10/±1 | |
| 充電時間(h) | ≤1.5 | |
| ドライブモード | ディファレンシャルドライブ |
Q8-2000A | 揚程(mm) | 100 |
| 規定荷重(kg) | 2000年 | |
| ナビゲーション | QRコード/LSLAM | |
| 登坂性(°) | 3 | |
| 回転径(mm) | 1780年 | |
| 定格運転時間(h) | 8 | |
| 寸法L*W*H(mm) | 1523*1150*327 | |
| 定格使用速度(無負荷)(m/s) | 0.9 | |
| 重量(kg) | 550 | |
| 位置決め精度(mm,°) | ±10/±1 | |
| 充電時間(h) | ≤1.5 | |
| ドライブモード | ディファレンシャルドライブ |
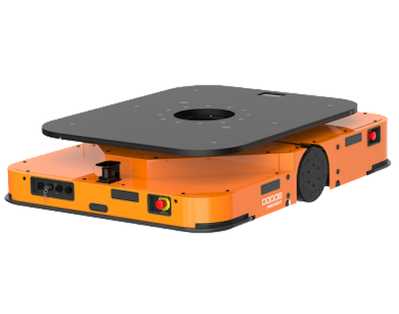
2. シャーシの種類
潜在ロボットシャーシ車両は、上位層の拡張機能とシャーシのモビリティ機能を備えたロボットプラットフォームです。その特徴は、テーブルに独自の上部取り付け穴があり、ハードウェア インターフェースを取得するために上部機構に統合インターフェース ボードが提供されていることです。ローラー、小型ロボットアーム、検査カメラ、環境検知装置など、さまざまな上位拡張ニーズに対応でき、豊富な機能を備えています。二次開発および拡張機能は、さまざまな産業、倉庫、物流、インテリジェント製造やその他のシナリオ。
Q3B-600C-D | 揚程(mm) | / |
| 規定荷重(kg) | 600 | |
| ナビゲーション | QRコード | |
| 登坂性(°) | 3 | |
| 回転径(mm) | 995 | |
| 定格運転時間(h) | 8 | |
| 寸法L*W*H(mm) | 950*650*300 | |
| 定格使用速度(無負荷)(m/s) | 2.0 | |
| 重量(kg) | 126 | |
| 位置決め精度(mm,°) | ±10/±1 | |
| 充電時間(h) | ≤1.5 | |
| ドライブモード | ディファレンシャルドライブ |
Q3B-600L-D | 揚程(mm) | / |
| 規定荷重(kg) | 600 | |
| ナビゲーション | LSLAM | |
| 登坂性(°) | 3 | |
| 回転径(mm) | 995 | |
| 定格運転時間(h) | 8 | |
| 寸法L*W*H(mm) | 950*650*300 | |
| 定格使用速度(無負荷)(m/s) | 2.0 | |
| 重量(kg) | 126 | |
| 位置決め精度(mm,°) | ±10/±1 | |
| 充電時間(h) | ≤1.5 | |
| ドライブモード | ディファレンシャルドライブ |
Q7B-1000C-E | 揚程(mm) | / |
| 規定荷重(kg) | 1000 | |
| ナビゲーション | QRコード | |
| 登坂性(°) | 3 | |
| 回転径(mm) | 1200 | |
| 定格運転時間(h) | 8 | |
| 寸法L*W*H(mm) | 1150*820*300 | |
| 定格使用速度(無負荷)(m/s) | 2.0 | |
| 重量(kg) | 184 | |
| 位置決め精度(mm,°) | ±10/±1 | |
| 充電時間(h) | ≤1.5 | |
| ドライブモード | ディファレンシャルドライブ |
Q7B-1000L-E | 揚程(mm) | / |
| 規定荷重(kg) | 1000 | |
| ナビゲーション | LSLAM | |
| 登坂性(°) | 3 | |
| 回転径(mm) | 1200 | |
| 定格運転時間(h) | 8 | |
| 寸法L*W*H(mm) | 1150*820*300 | |
| 定格使用速度(無負荷)(m/s) | 2.0 | |
| 重量(kg) | 184 | |
| 位置決め精度(mm,°) | ±10/±1 | |
| 充電時間(h) | ≤1.5 | |
| ドライブモード | ディファレンシャルドライブ |
の特徴 フォークリフトAGV
アプリケーション




Add: NO.409 West Jianshe Road, Economic Development Zone, Jinhu County, Jiangsu Province, China
ぜひ読んで、最新情報を入手し、購読してください。ご意見をお聞かせください。



著作権
2026@ Jiangsu Kingmore Storage Equipment Manufacturing Co., Ltd 全著作権所有。
サイトマップ
| ブログ
| Xml
| プライバシーポリシー
 サポートされているネットワーク
サポートされているネットワーク
 日本語
日本語 English
English español
español 한국의
한국의 Deutsch
Deutsch français
français العربية
العربية português
português 中文
中文 русский
русский